Lexikon olika typer av noggrannhetsfel på lägesgivare
Noggrannhet kan definieras som riktighet av uppmätt värde i jämförelse med det riktiga värdet. I en teoretiskt perfekt värld ska utsignalen från en proportionell lägesgivare vara den exakta representationen av positionen. Utsignalen går i en rak linje mellan 0-100% i proportion till lägesförändringen. Men i verkligheten finns olika typer av noggrannhetsfel, nedan är en ordbok över några av de vanligaste begreppen.
Linjäritet
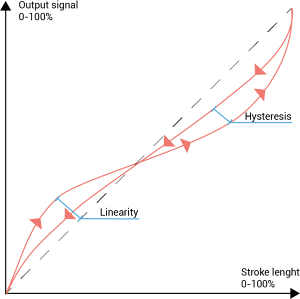
Linjäritet eller linjäritetsfel är avvikelsen mellan den teoretisk perfekta linjen och den verkliga utsignalen. Linjäritet kan uttryckas i absoluta termer t ex millimeter [mm] eller milliampere [mA], eller relativt till hela slaglängden (full scale) t ex 0,05% [FS].
Hysteres
Hysteres är skillnaden på utsignalen mellan ökande värden och sjunkande värden. Hysteres kan ses som ett noggrannhetsfel i proportionella lägesgivare, men används som en egenskap i många brytande givare. T ex gränslägesbrytare och termostater använder hysteres för att undvika brus (snabba, upprepande brytningar av/på) vid brytpunkten.
Repeterbarhet
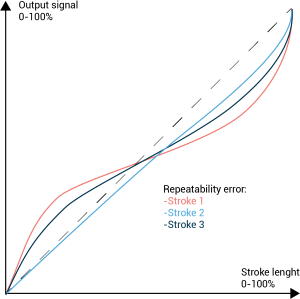
Reperterbarhet är ett mått på hur väl karaktäristiken på utsignalen stämmer överens mellan repeterade rörelser över slaget. Om utsignalen ändrar karaktär mellan rörelser över slaglängden har man en avvikelse i reperterbarhet. Linjäritets och hysteres fel är stabila och ändras inte mellan slag och kan därför kalibreras bort. Men fel i reperterbarhet förändras vid varje rörelse över slaget och är därför svårt att kalibrera bort.
Upplösning
Upplösning är skalan för den minsta förändring en sensor kan mäta. Om upplösning ska klassas som noggrannhetsfel eller en egenskap är en ändlös diskussion, då mätningen inte nödvändigtvis är fel. Men för låg upplösning medför att utsignalens representation av verkligt värde kan vara för grovt. Precis som ett lågupplöst foto, det är inte fel men inte bra nog.